 0571-28914573
0571-28914573

【电话机器人】OpenAI的“最先进的”系统让机器人变得像人类一样灵巧
- 作者:admin
- 发表时间:2018-08-03 14:01
- 来源:未知
今年6月,由ElonMusk、ReidHoffman和PeterThiel等业界巨头支持的非营利机构、总部位于旧金山的人工智能' target='_blank'>人工智能研究公司OpenAI宣布,其最新版本的Dota2-playAI——被称为OpenAIFive——成功击败了业余玩家,成为头条新闻。今天,它又推出了另一款能够像人类一样灵巧地操纵物体的机器人系统。
OpenAI的研究人员在即将发表的一篇论文《灵巧的手工操作》中描述了一个系统,该系统使用了一个强化模型,在这个模型中,人工智能通过尝试和错误来学习,指导机器人用最先进的精度抓取和操作物体。更让人印象深刻的是,它是完全数字化的,在一个计算机模拟中训练的,没有提供任何人类演示来学习。
研究小组写道:“虽然灵巧地操纵物体对人类来说是一项基本的日常任务,但对于自主机器人来说,这仍是一项挑战。”“现代机器人通常是为特定任务而设计的,在受限的环境中,它们在很大程度上无法使用复杂的末端执行器……在这项工作中,我们演示了训练控制策略的方法,这些策略执行手控操作,并将它们部署在一个物理机器人上。”
那么他们是怎么做到的呢?
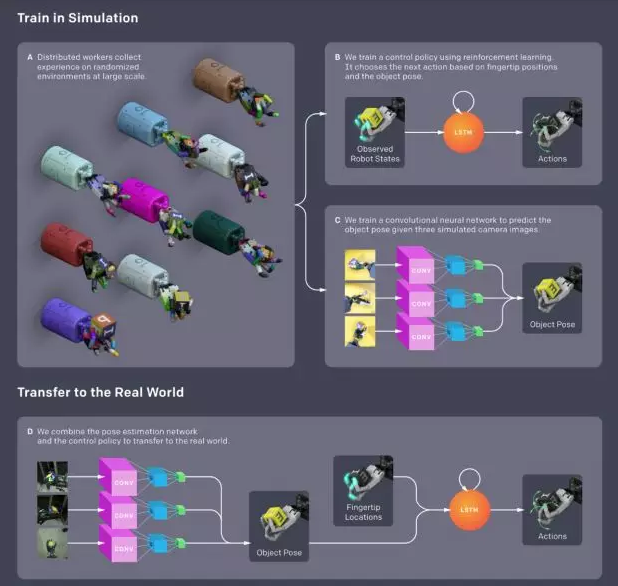
研究人员使用MuJoCo物理引擎模拟一个真实的机器人可能在其中工作的物理环境,并用Unity渲染图像,训练计算机视觉模型识别姿势。但是这个方法有它的局限性,团队写道——这个模拟仅仅是物理设置的一个“粗略的近似”,这使得它“不太可能”产生能够很好地转化为现实世界的系统。

他们的解决方案是随机化环境的各个方面,比如物理(摩擦、重力、关节极限、物体尺寸等等)和视觉外观(灯光条件、手和物体的姿态、材料和纹理)。这既降低了过度拟合的可能性——当神经网络学习训练数据中的噪声,对其性能产生负面影响时,就会出现这种现象——也增加了产生一种算法的机会,该算法可以根据真实世界的指尖位置和目标姿态成功地选择动作。
接下来,研究人员用384台机器(每个机器有16个CPU内核)训练了这个模型——一个周期性的神经网络,让它们每小时产生大约两年的模拟体验。在8台GPU电脑上进行优化后,他们进入了下一个步骤:训练一个卷积神经网络,该神经网络可以从三个模拟相机图像中预测机器人“手”中的物体位置和方向。
一旦模型被训练,它就进入了验证测试。研究人员使用了一只“影子灵巧手”,这是一只机械手,有五个手指,总共有24个自由度。与此同时,两套相机——运动捕捉相机和RGB相机——作为系统的眼睛,允许它跟踪物体的旋转和方向。(虽然这只“影子灵巧手”有触觉传感器,但研究小组只选择了它的关节感应能力,用于控制手指的位置。)
在两个测试中的第一个,算法的任务是重新定位一个标有字母的块。团队选择了一个随机的目标,每次人工智能完成时,他们都选择了一个新的目标,直到机器人(1)放弃了块,(2)花了一分钟多的时间来操作块,或者(3)达到了50个成功的旋转。在第二次测试中,该块用八角形棱镜交换。
结果呢?这些模型不仅展示了“前所未有”的表现,而且还自然地发现了在人类身上观察到的各种抓握类型,如三脚架(用拇指、食指和中指的一种抓握)、棱柱式抓握(用拇指和手指相对的一种抓握)和指尖夹握。他们还学习了如何旋转和滑动机器人的手指,以及如何利用重力、平移和扭转力将物体放置到想要的位置。
他们写道:“我们的系统不仅能重新发现人类身上已经发现的,还能让它们更好地适应自身的局限和能力。”
这并不是说这是一个完美的系统。它没有被明确训练来处理多个对象——它很难旋转一个球形的第三个物体。在第二次测试中,仿真与真实机器人之间存在可测量的性能差异。
但最终,研究结果证明了当代深度学习算法的潜力,研究人员总结道:“(这些)算法可以应用于解决复杂的现实世界机器人问题,而这些问题是现有的非基于学习的方法无法解决的。”
版权声明:本文为悟空话务机器人(杭州大坝科技有限公司)原创文章,未经允许不得转载。 http://www.hzdaba.com/news/2018/0801/173.html
相关热词:openai,机器人
